Drohnen und andere Roboter
Januar 9, 2018
Aus dem Unterricht des CAS Disruptive Technologies mit Davide Scaramuzza berichtet Patrik Auf der Mauer.
Es war ein sehr interessanter Tag mit vielen Informationen zu Drohnen und Roboter und einem Hands-on-Besuch im Lab von Davide Scaramuzza. Am Vormittag ging es los mit einer Einführung in die Thematik.
Definition: Roboter sind mechanische oder elektromechanische Maschinen, welche definierte Instruktionen befolgen. Dabei unterscheidet man zwischen:
Robotic Exoskeletons und Prosthetic Devices

Robotic Exoskeletons und Prosthetic Devices zur Unterstützung oder Erweiterung der menschlichen Kräfte und Bewegungen (Bild: MIT Technology Review).
Stationäre Roboter
Diese sind an einen fixen Standort, wie z.B. eine Fertigungsstrasse gebunden.

Stationäre, fix montierte Roboter (Bild: Designspark).
Mobile Roboter
Diese bewegen sich frei und sind nicht an einen fixen Standort gebunden, dabei wird weiter unterschieden zwischen:
Ground Robots (AGV: Automated Guided Vehicle)

Ground Robot, sich frei am am Boden bewegende Roboter (Bild: Wired)
Flying Robots oder Drohnen (UAV: Unmanned Aerial Vehicles und MAV: Micro Aerial Vehicles), welche sich frei in der Luft bewegen können.
Flying Robots und Drohnen, sich frei in der Luft bewegende Roboter (Bild: Daily Mail).
Underwater Robots (AUV: Autonomous Underwater Vehicles), welche sich frei im Wasser bewegen können.

Underwater Robots, sich frei im Wasser bewegende Roboter (Bild: Marine Insight).
Nach der Pause stellten wir uns der Frage: «Was braucht es um ein autonomes Fahrzeug zu bauen?
Um autonom fahren zu können, gilt es, folgende drei Punkte zu beachten:
Wie sieht meine Umwelt aus (Wahrnehmung)?
Dazu werden Informationen aus Sensoren (Laser, Kamera, Radar und Sonars) genutzt, um Objekte wie Fussgänger, Fahrzeuge, Signalisation, etc. zu interpretieren.
Wo bin ich (Lokalisierung)?
Nutzung der Informationen des GPS, wenn dieses verfügbar ist, ansonsten kann auf vorhandenes Kartenmaterial zurückgegriffen, oder mit den entsprechenden Sensoren selbst eine Karte erstellt werden.
Wie komme ich ans Ziel?
Hierzu wird selbständig, unter Verwendung der geeigneten Algorithmen, versucht, den Weg von A nach B ermitteln. Dabei gilt es den besten Weg zu finden (Faktoren sind Zeit, Energieverbrauch, attraktive Strecke, etc.) und allfälligen Hindernissen ausweichen.
Um diese Fragen zu beantworten, stehen u.A. die folgenden Sensoren zur Verfügung:
Diese verschiedenen Sensoren werden in verschiedenen Kombinationen angewandt um z.B. die aktuelle Position zu bestimmen (im Idealfall mit GPS, ggf. unterstützt durch Wheel Encoder und Range Sensors) oder um Objekte, welche im Weg stehen, korrekt zu interpretieren, um passend zu reagieren (dabei kommt auch Künstliche Intelligenz und Deep Learning zum Einsatz).
Am Nachmittag führte uns Prof. Davide Scaramuzza durch das Lab der Robotics and Perception Group der ETH Zürich und demonstrierte dabei die neusten Technologien und Resultate im Bereich der Drohnen-Forschung.
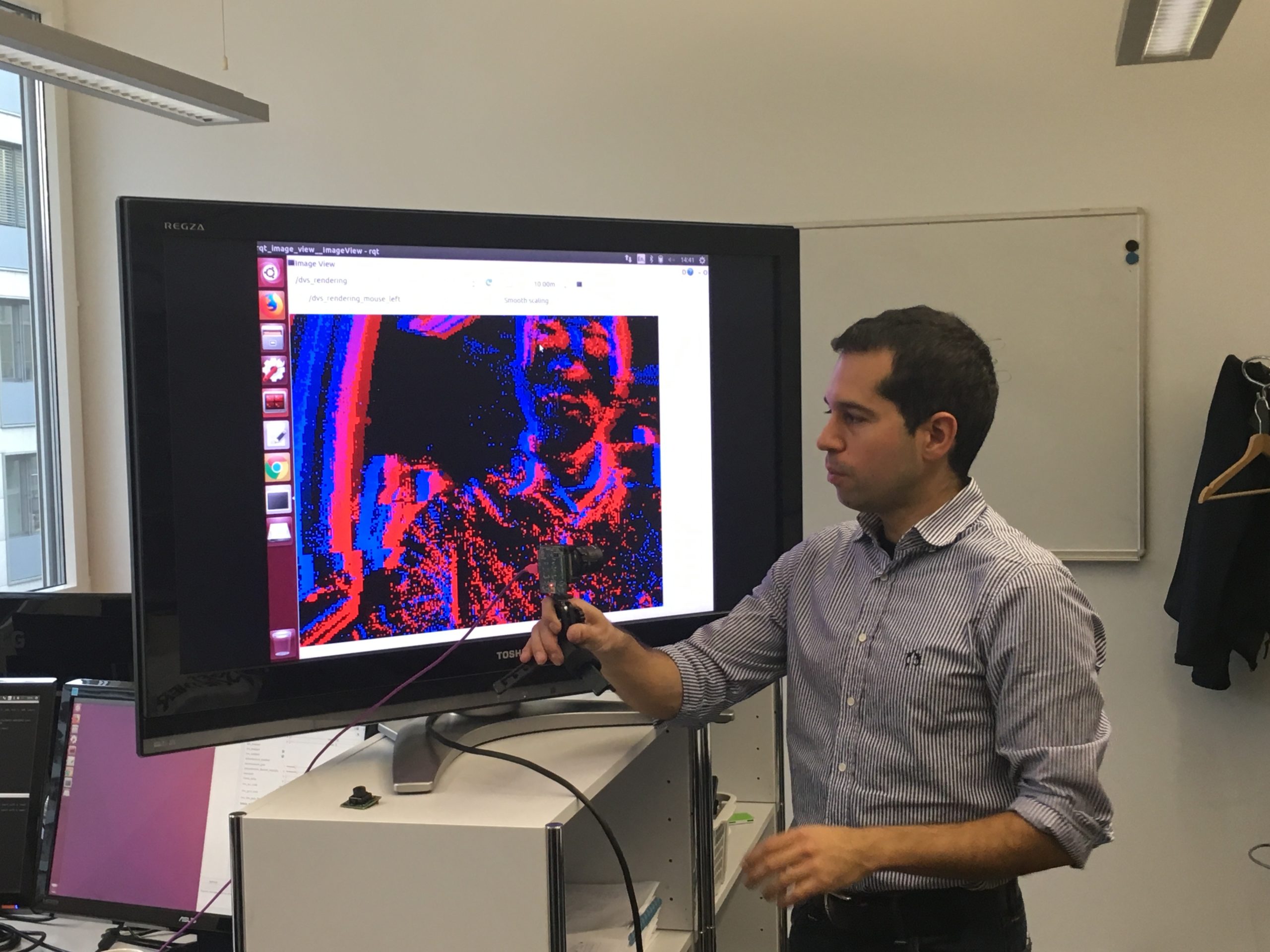
Demonstration der neusten Kameratechnologien von Davide Scaramuzza bei der Robotics and Perception Group der ETH Zürich

Einblick in das Drohnen-Museum der Robotics and Perception Group der ETH Zürich

Flugdemonstration der neusten «sich-selbst-positionierenden» Drohne von Davide Scaramuzza bei der Robotics and Perception Group der ETH Zürich
Mit dieser Flugstunde endete der spannende Tag mit fundierten Informationen zum aktuellen Stand der Roboter-Entwicklung und der Drohnen-Forschung bei der Robotics and Perception Group der ETH Zürich.
Unser Newsletter liefert dir brandaktuelle News, Insights aus unseren Studiengängen, inspirierende Tech- & Business-Events und spannende Job- und Projektausschreibungen, die die digitale Welt bewegen.