Drohne kommt überall durch
Januar 2, 2019
Aus dem Unterricht vom 21. Dezember 2018 des CAS Disruptive Technologies mit Prof. Dr. D. Scaramuzza von der Universität Zürich. Ein Bericht über AUTONOMOUS MOBILE ROBOTS von Patrik Kamber, HWZ Student 2018.
Als ich am 14.12.2018 im Tagesanzeiger die spannende Story „Diese Drohne kommt überall durch“ las, hatte ich noch keine Ahnung davon, dass ich genau die dargestellte Drohne am 21. Dezember 2018 im Unterricht mit Prof. Dr. D. Scaramuzza zu Gesicht bekommen werde.
Mindestens so spannend wie der Tagesanzeiger Artikel war der ganze Tag mit Prof. Dr. D. Scaramuzza. Das Fokusthema war Drohnen-Robotik. Am Morgen lernten wir die Materie rund um das Thema in Theorie kennen, am Nachmittag durften wir sein Lab in Zürich Oerlikon besuchen.
Prof. Dr. D. Scaramuzza definiert einen Roboter als eine mechanische oder elektromechanische Maschine, welche einer Serie von vordefinierten Instruktionen folgt. Bereits bei einer vollautomatischen Kaffeemaschine handelt es sich demnach um einen Roboter. Auch im professionellen Umfeld werden umfangreich Roboter eingesetzt. Ärzte operieren unterstützt mit dem da Vinci Surgical System an Wunden, die äusserstes Feingefühl verlangen, oder stationäre Roboter montieren Autoteile zu einem Ganzen zusammen.
Eine ganze Reihe von Roboter hat in den letzten Jahren Einzug in unseren Alltag genommen. Bei vielen steht die Mobilität im Vordergrund. Die mobilen Roboter können in drei Klassen unterschieden werden:
Speziell bei mobilen Robotern wie autonome Drohnen spielt die Sensorik eine entscheidende Rolle. Die Sensorik muss die Fragen zur Umgebung beantworten. „Wo bin ich, wie ist meine Umgebung und wie komme ich zu einem bestimmten Ort“ stehen im Vordergrund.
Da ein einzelner Sensor die komplexe Orientierung und Ortung von Drohnen nicht alleine bestimmen kann, müssen verschiedenartige Sensoren auf einander abgestimmt eingesetzt werden. Diese Sensoren befähigen mobile Roboter wesentlich:
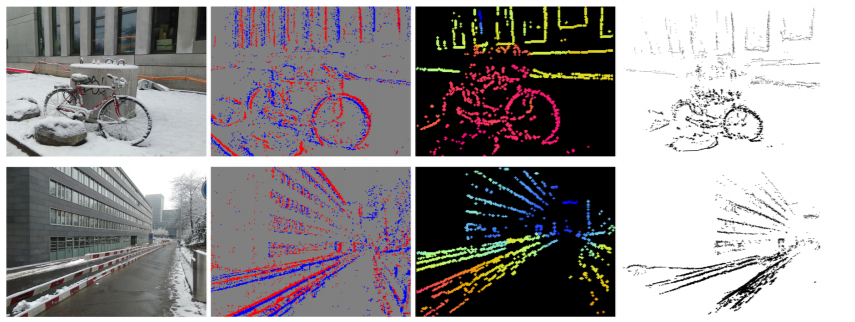
Als besondere Herausforderung gilt die Analyse via Kamera. Die hohen Bandbreiten von Bildern erschweren die kontinuierliche Aufzeichnung der Umgebung. Die Berechnung der Bilder innert aller kürzester Zeit muss daher anders gelöst werden. Die Robotics and Perception Group der Universität Zürich hat im Dezember 2018 den Code für Event-based Multi-View Stereo (EMVS), 3D reconstruction with an event camera, veröffentlicht. Dieses System nimmt vereinfacht dargestellt nicht mehr Bild um Bild auf, sondern nur dessen Veränderungen.
Im Lab arbeitet das Team um Prof. Dr. D. Scaramuzza unter anderem an autonomen Drohnen. Wie es sich für einen praxisbezogenen Besuch gehört, konnten wir die jüngsten Entwicklungen fliegen sehen und auch selber fliegen lassen. Sehr beeindruckend und stabil orientierten sich die Flugmaschinen selbständig im Testraum. Eher unspektakulär aber sehr fasziniert konnten wir live am Monitor mitverfolgen, wie die Drohne sich in einem Raum bewegt, der für sie absolut neu ist. Eine solche Orientierung verlangt der Software Spitzenleistungen ab.
Abgerundet wurde der Nachmittag mit einer spannenden Gesprächsrunde, wir Studierenden konnten sich mit den Forschern austauschen und haben spezifische Fragen beantwortet bekommen. Das Unterrichtsthema ist hoch aktuell und wird unsere Gesellschaft nachhaltig beeinflussen.
An dieser Stelle nochmals herzlichen Dank an Davide Scaramuzza für den guten Unterrichtstag.
Unser Newsletter liefert dir brandaktuelle News, Insights aus unseren Studiengängen, inspirierende Tech- & Business-Events und spannende Job- und Projektausschreibungen, die die digitale Welt bewegen.