Autonomous Mobile Robots
Dezember 4, 2019
Ein spannender Tag rund um das Thema autonome Roboter und Drohnen der uns geboten wurde. Präsentiert von einem Mann, Prof. Dr. David Scaramuzza, der mit voller Passion und Faszination Theorie und Praxis verbindet.
Vormittag – Los ging es mit den theoretischen Grundlagen und einem Einstieg mittels praktischen Beispielen.
Das Wort Roboter stammt vom tschechischen Wort ‘robota’ (zu Deutsch in etwa Zwangsarbeit) und wurde dort 1920 in einem Theaterstück über Maschinenmenschen benutzt. Dr. Scaramuzza beschreibt in seinem Unterricht die Roboter als “A mechanical or electromechanical machine that follows a set of user defined instructions (i.e., program, algorithm)”. Autonom im Zusammenhang der Robotik bedeutet, dass der Roboter eigenständig, also ohne Fremdsteuerung und Hilfe in der angedachten Aufgabe funktioniert.
Im Allgemeinen lassen sich folgende Arten innerhalb der Robotik unterscheiden:
Stationäre Roboter
Sind fest an einen Standort gebunden und folgen in der Regel einem fixen Bewegungsablauf. Klassische Beispiele finden sich in Form von Industrie- oder Medizinrobotern.
Mobile Roboter
Sind, wie der Name vermuten lässt, mobil und nicht an einen festen Standort gebunden. Mobile Roboter sind autonom und bewegen sich mittels verschiedenen Sensoren und Vernetzung fort. Als Beispiel sind hier Laufroboter, Flugroboter (i.d.R. Drohnen), Unterwasserroboter oder auch Bodenroboter.
Das Wichtigste zusammengefasst:
Roboter ermöglichen eine(n):
Nach der Pause heisst es Schluss mit der Theorie und auf zur Technik. Schnell wird klar, damit es mit der Robotik nicht so endet wie im Video, braucht es ausgeklügelte Techniken und Ideen.
Eigentlich muss man sich nur drei simple Fragen nach der Wahrnehmung, der Lokation und dem Weg dahin stellen. Doch so einfach ist es leider doch nicht….. Es sind verschiedenste Kombinationen von Technologien, Wissenschaften und Methoden nötig, wie bspw.:
Die theoretischen Elemente verdaut, trafen wir uns am Nachmittag im Informatik-Labor «Robotics and Perception» der Universität Zürich in Oerlikon. Das Lab wurde im Jahr 2012 durch Prof. Davide Scaramuzza gegründet. Seine Mission ist es, zusammen mit Doktoranden und Studenten, autonome Maschinen zu entwickeln, die allein mithilfe von Onboard-Kameras navigieren können. Kurz gesagt, weder GPS noch andere Sensoren werden zur Hilfe herangezogen.
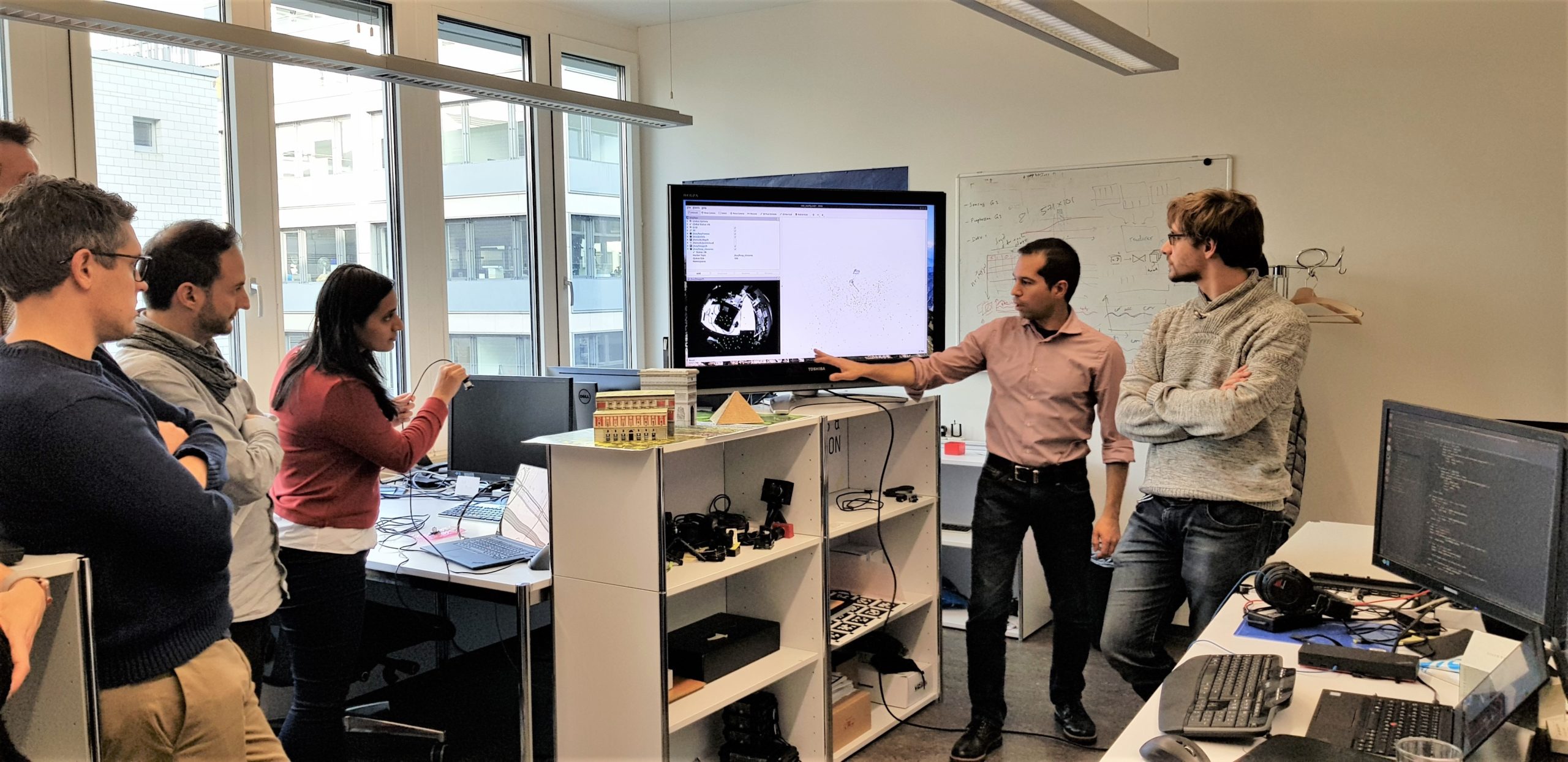
Im Briefing Raum versammelt, führte uns Prof. Scaramuzza anhand verschiedener Beispiele an die Technologie der visuell basierten Lokalisation, genannt VSLAM, heran. Mit «VSLAM» kann die autonome Drohne oder der Roboter eigenständig eine Umgebungskarte aufbauen. Es ist ein Wechselspiel zwischen der Position der Drohne und der relativen Position möglicher Hindernisse. Umgebungseigenschaften werden dann ausgehend von der eigenen Position als absolutes Element in der Karte eingezeichnet.
Prof. Scaramuzza erklärte uns, dass er und sein Team zwischen 2015-2018 erfolgreich am DARPA Fast Lightweight Autonomy Wettbewerb teilgenommen hatten. Bei diesem Wettbewerb gilt es, mit kleinen unbemannten Quadkoptern autonom durch überfüllte Gebäude und hindernisbehaftete Umgebungen zu fliegen. Dies mit hohen Geschwindigkeiten, bis zu 20 Meter pro Sekunde. Einzig Onboard-Kameras und intelligente Algorithmen zur Selbstnavigation dürfen verwendet werden.
Drohnen und Roboter mit VSLAM Technologie finden in vielen Bereichen Anwendung wo autonome Orientierung und Kartenerstellung zwingend ist. Zum Beispiel in der Rettung von Menschen nach Erdbebenkatastrophen. Oft ist es durch die Einsturzgefährdung und den engen Räumlichkeiten Rettern nicht möglich nach Opfern zu suchen. Desweiteren verirren sich jährlich ca. 1’000 Menschen in den Schweizer Bergen und ungefähr 100’000 Menschen auf der ganzen Welt. Autonome Drohnen (oder Drohnenschwärme) könnten in naher Zukunft eingesetzt werden, um vermisste Personen zu finden. Da die meisten vermissten Menschen in der Nähe von Pfaden gefunden werden, wird den Drohnen mittels Deep Learning Algorithmen beigebracht, Pfade zu erkennen.
Ein weiteres Beispiel ist die Stabilisierungsmöglichkeit der Drohne oder das autonome Landen ohne die Menschen dabei zu gefährden. Mithilfe der visuell basierten Lokalisation ist es möglich eine Drohne ohne GPS zu stabilisieren und sicher zu landen sind. Prof. Scaramuzza erklärte weiter, dass es in der Schweiz für kommerzielle Drohnen noch keine klare Gesetzgebung gibt, welche technisch vorschreibt, wie Drohnen im Notfall sicher zu landen seien. Dies ist erstaunlich, vor allem wenn man bedenkt, dass einige Pilotversuche mit Quadrokoptern durchgeführt wurden. Würde ein Rotor versagen, fällt die Drohne vom Himmel.
Nach dem Briefing sahen wir einige Drohnen Exemplare aus vergangenen Projekten, welche zum Teil kommerzialisiert wurden.

Der abgebildete Fototokite ist für Luftaufnahmen entwickelt worden und wird von Journalisten und Filmemachern weltweit genutzt, da heute gültige Gesetzgebungen das Filmen über Menschenansammlungen nicht erlaubt. Die Verwendung von einem Drahtseil erhöht die Sicherheit, vereinfacht die Kontrolle und verlängert die Akkulaufzeit durch die direkte Verbindung mit dem Akku.
Die «Folding Drone» im Bild hat die Möglichkeit, mithilfe Hilfe von vier Elektromotoren, die Arme unabhängig voneinander in verschiedene Stellungen zu bringen. Diese Manövrierfähigkeit ermöglicht es der Drohne durch komplexe Umgebungen zu navigieren, beschädigte Gebäude und sogar unterirdische Tunnel und Höhlen zu erkunden.


Event-Kameras
Unsere nächste Station auf der Tour war die Abteilung für Eventkameras. Zwei Studenten demonstrierten uns eindrucksvoll die Möglichkeiten solcher Event-Kameras, welche sich grundlegend von normalen Video Kameras unterscheiden. Statt Bilder mit einer festen Rate zu messen, werden Helligkeitsänderungen, Zeit und Lokation pro Pixel aufgenommen. Eventkameras haben ein grosses Potenzial für Robotik und Computer-Vision.
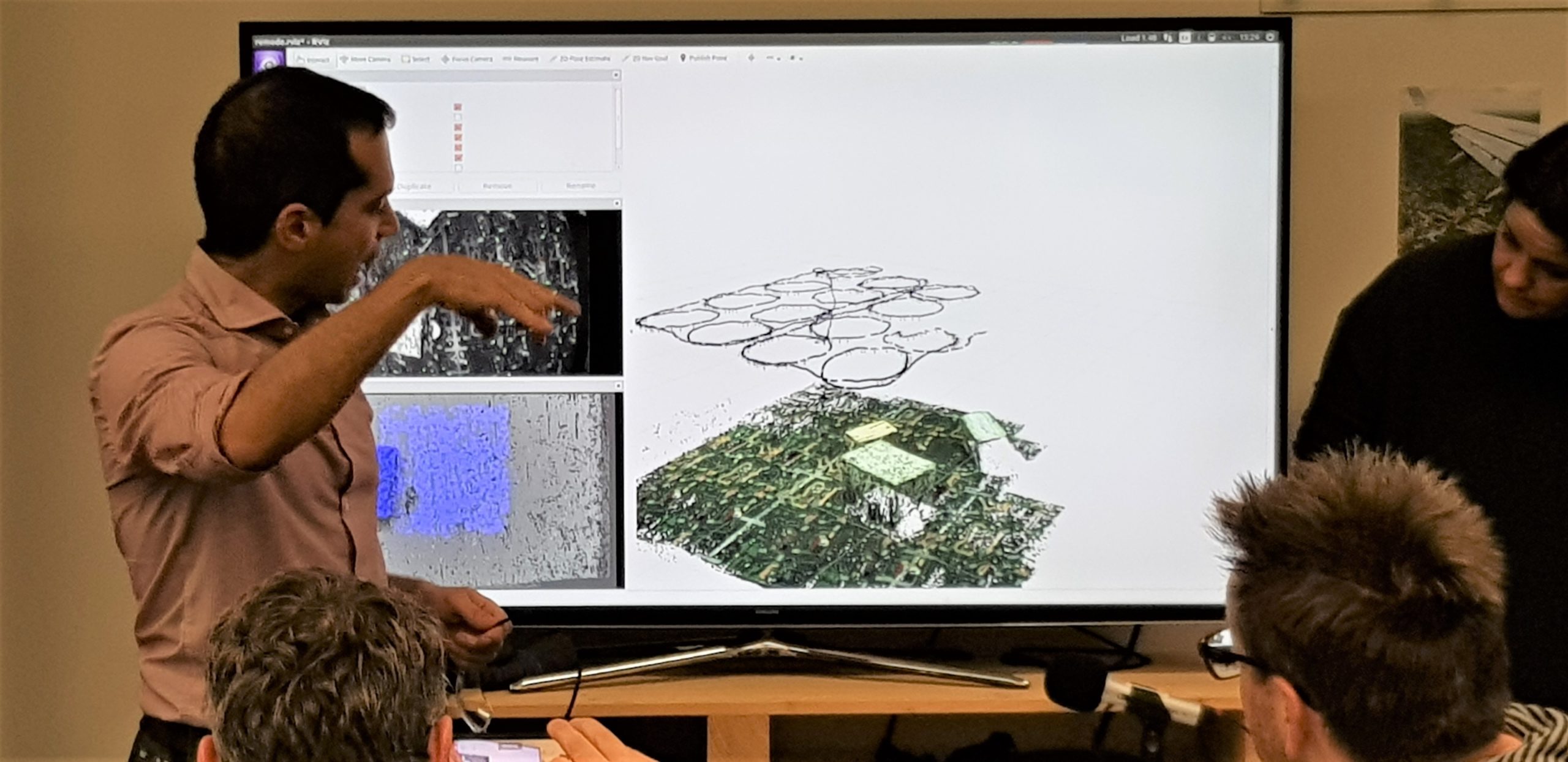
Event Kameras sind essenziell für Drohnen, welche für die visuell basierte Lokalisation oft nicht genügend Licht vorfinden. Weitere Anwendungszwecke finden sich im 3D Mapping von Gebäuden, wie hier auf dem Bild gezeigt.
Gespannt kamen wir nun zu unserer letzten Station. Dem Raum in dem sich die Theorie in der Praxis bewähren muss.

Als Erstes wurde uns die oben beschriebene «Folding Drone» vorgeführt. Prof. Scaramuzza demonstrierte verschiedene Figuren, welche mittels der Elektromotoren und der Bewegung der Arme erreicht werden können. Zusätzlich sprach er über die aerodynamischen Herausforderungen, die sich durch das Verschieben der Arme ergeben und die mit Hilfe von Algorithmen, welche der on-board Computer rechnet, kompensiert werden müssen. Als zweites Experiment wurde versucht die Drohne aus ihrer stabilen Position zu bewegen.
Wir konnten nun live miterleben, dass die visuell basierte Lokalisation zur Stabilisierung der Drohne tatsächlich funktioniert. Ausserdem erlaubt die visuell basierte Lokalisation die Steuerung der Drohne im sogenannten «Headless Mode».
Die Verbindung der Forschung an den Event Kameras, der Lokalisationstechnik und den Drohnen, bilden nun die Grundlage für ein erfolgreiches Zusammenspiel die Objekte im Raum zu erfassen und die Orientierung auch ohne GPS nicht zu verlieren. Eindrücklich sieht man dies auf dem Bild. Erkennbar ist die Drohnenposition, dargestellt in Kreisform und das 3D Abbild von den aufgestellten Objekten.
Aus unserer Sicht sind die differenzierenden Eigenschaften solcher Drohnen:
Abschliessend, erzählten uns Prof. Scaramuzza und sein Team von dem Drohnenrennen «AlphaPilot Innovation Challenge», wofür sie sich qualifiziert haben. Es findet in am 6.Dezember in Austin, Texas, statt. Von den 420 Teams, die sich 2019 bewarben erhielten nur 9 Finalisten die Möglichkeit sich im Wettbewerb um den autonomen Flug zu behaupten und das damit verbundene Preisgeld in der Höhe von USD Mio. 1.25 zu gewinnen.
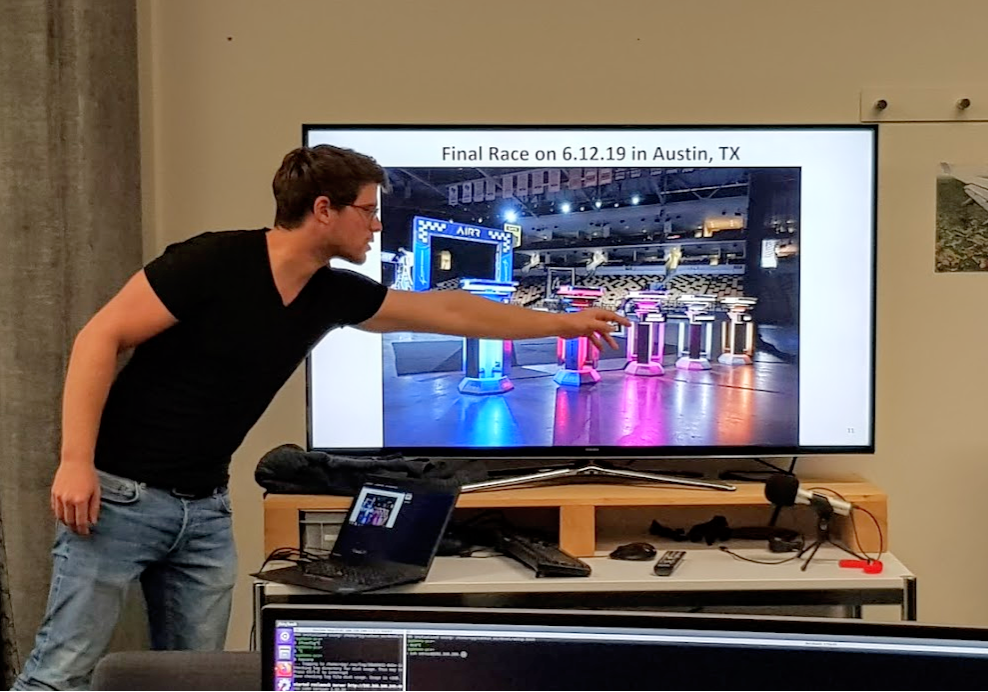
Das Rennen umfasst mehrere Runden und wird auf einem 300 Metern langen Parcours ausgetragen. Es gilt 30 Tore möglichst schnell, und ohne eins auszulassen, zu passieren.


Quelle: https://www.news.uzh.ch/de/articles/2019/AlphaPilot-Challenge.html
Alle Teams werden das gleiche Drohnenmodell verwenden, jedoch mit ihrem eigenen Code bestücken, und vor dem Wettkampf testen. Die Testphase für solche Unterfangen ist sehr kurz und eine der grössten Herausforderungen. Natürlich wollten wir verstehen wie sich die Teams unterscheiden und welche Faktoren die Gewinnchancen erhöhen. Die Antwort liegt in den Algorithmen, gekoppelt mit Künstlicher Intelligenz, an welchen das Team bis zum Wettkampf arbeiten wird. Diese sind verantwortlich, dass die autonome Drohne die Tore identifizieren und möglichst schnell durchfliegen kann. Erschwerend, so die Ausführungen, sind die Lichtverhältnisse und mögliche äusserliche Einflüsse wie das Blitzgewitter von Fotokameras. Bis es endgültig losgeht, wird auf der eigens aufgestellten Rennstrecke im Innovationspark Dübendorf getestet.
Wir danken Prof. Dr. David Scaramuzza und seinem Team für einen sehr interessanten und lehrreichen Tag und wünschen Ihnen viel Erfolg in Austin.
Unser Newsletter liefert dir brandaktuelle News, Insights aus unseren Studiengängen, inspirierende Tech- & Business-Events und spannende Job- und Projektausschreibungen, die die digitale Welt bewegen.