Rise of the Machines
November 10, 2015
Marco Canepa und Ali Soy fassen den siebten Kurstag des CAS Disruptive Technologies zum Thema “Robotics” zusammen:
Nach kurzer Vorstellung durch unseren Studiengangsleiter Marcel Blattner führt uns Prof. Dr. Davide Scaramuzza in die Welt der Robotics ein. Der Professor leitet das Robotics & Perception Lab der Uni Zürich.
Als erstes vorweg: Die ersten Roboter wurden 1920 im Theaterstück “Rossum’s Universal Robots” von Karl Capek erwähnt.
Rossum’s Universal Robots
Doch was ist überhaupt die Definition eines Roboters? Ein Roboter ist eine mechanische oder elektromechanische Maschine, die einem bestimmten Set von vordefinierten Instruktionen folgt. Dies kann ein Programm oder aber auch ein entsprechender Algorithmus sein. Als einfaches Beispiel kann man hier einen unserer alltäglichsten Gebrauchsgegenstände nennen: unsere geliebte Nespresso-Maschine.

Nespresso Machine
Grundsätzlich lassen sich Roboter in zwei verschiedene Kategorien einteilen:
Und weshalb brauchen wir überhaupt Roboter? Weil sie intelligenter, sicherer und sauberer sind.
In der Vergangenheit führten Roboter v.a. monotone, sich immer wiederholende Vorgänge aus (zum Beispiel in der Automobilherstellung). Seit 2000 sind bzw. werden Roboter immer lernfähiger und autonomer. Die wichtigsten Fragen, die sich ein Roboter stellen muss, um autonom agieren zu können, sind:
@davsca1 "Forget the concept of position – in #robotics you can only estimate where you are" #HWZDisrupt pic.twitter.com/irtfbWxQNH
— Ali Soy (@alisoy1502) October 16, 2015
Die Antworten darauf sind so logisch wie simpel.
Ein Roboter …
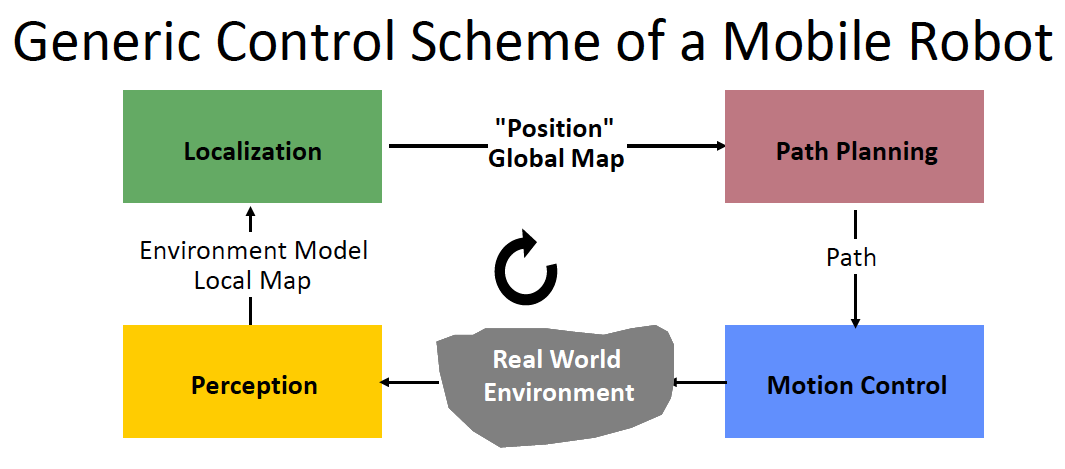
Dabei besteht die komplexeste Aufgabe für einen Roboter darin, seine Umgebung wahrzunehmen und sich selbst zu lokalisieren. Eine hundertprozentige Lokalisierung kann dabei jedoch nicht erreicht werden. Ein autonomer Roboter kann nur annehmen, wo er ist. Die Lokalisierung erfolgt auf Vorhersagen bzw. Positions-Annahmen. Eine GPS-Lokalisation alleine reicht aufgrund der Ungenauigkeit (wegen der Latenzzeiten) nicht aus. Die Umgebung nimmt ein Roboter durch verschiedene Technologien wie Laser Scanner (zum Beispiel Velodyn Laser), Kameras (Visual Based Navigation), Sonar Range Finder, Bump Detector, Heating Sensors, Wheel Encoders und viele weitere wahr. Der Gyroskope (mechanisch, optisch und MEMS) muss mit dem Beschleunigungssensor gekoppelt sein, damit der Gravitationseinfluss eliminiert werden kann.
Die neuste Generation von Robotern lernt immer weiter dazu. Gelerntes wird dabei in der Robo-Cloud (RoboEarth oder CloudRobotics) gespeichert und mit weiteren Robotern geteilt. Das Roboter-Betriebssystem ROS wurde bereits im Jahr 2007 durch Willow Garage in Stanford programmiert.
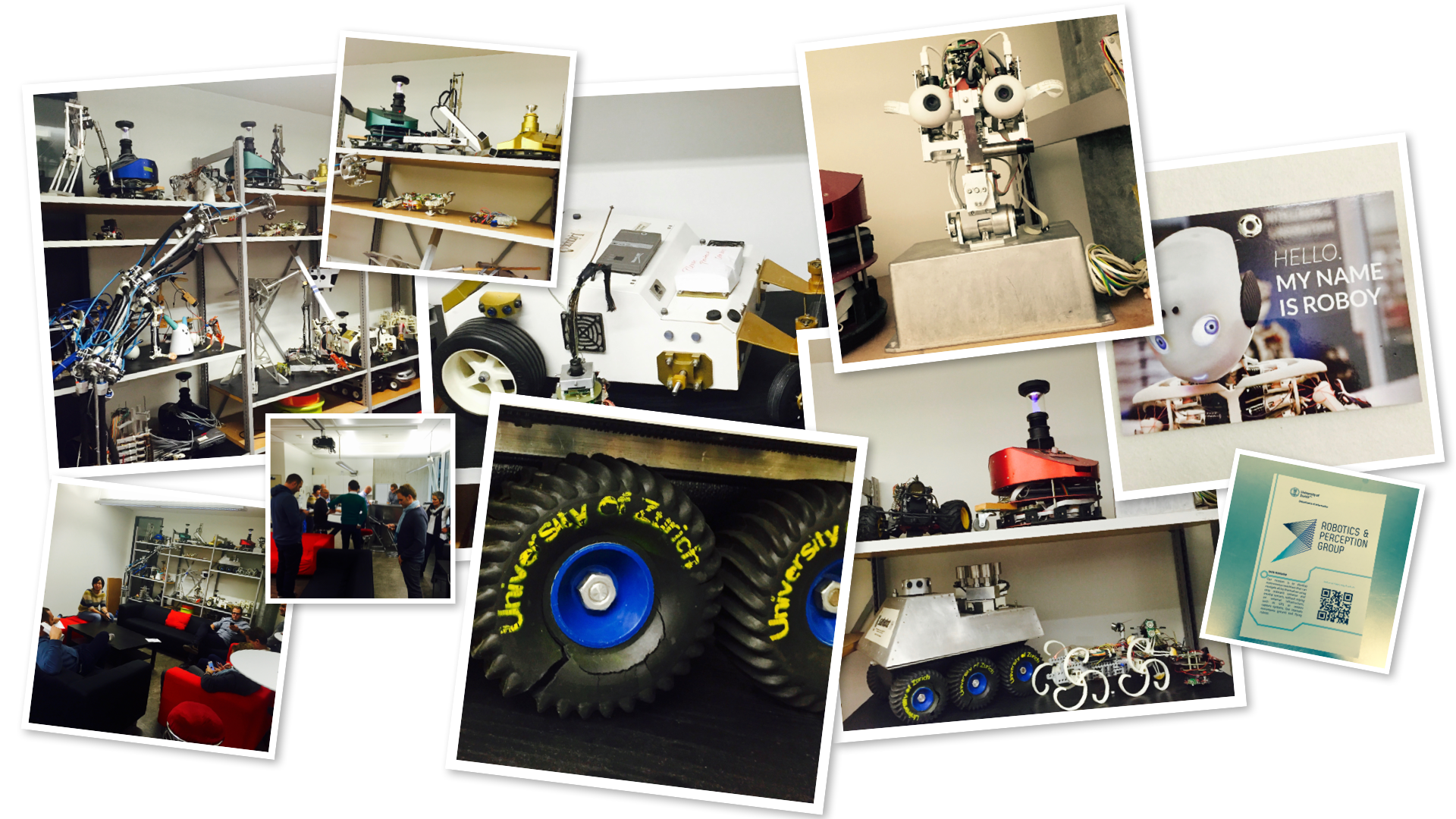
Am Nachmittag ging es am Homebase von Robotics weiter. Mit Live-Shows und Ausführungen vom Professor sowie auch von den Team-Mitgliedern waren wir mit hunderprozentiger Aufmerksamkeit dem Thema gewidmet. Nach einer Begrüssung in der Cafeteria der Robotics & Perception Group und einer kurzen Vorstellung der „Museumsstücke“ konnten wir bereits funktionierende, autonome Drohnen sehen und bestaunen.
Ausgediente Roboter in der Cafeteria.
Nicht alle sehen der Zukunft optimistisch entgegen.
"One day, the #robots will strike back!" #hwzdisrupt pic.twitter.com/ZKum3PB0SK
— Stefan Lienhard (@lienu) October 16, 2015
Die Einführung in autonome Drohnen war sehr aufschlussreich und interessant.
Nebst der Marke Eigenbau wurden uns die autonomen Drohnen von
vorgestellt.
Bilder sagen bekanntlich mehr als tausend Worte – und bewegte Bilder noch viel mehr. Hier die wichtigsten Aufzeichnungen vom Nachmittag.
Und so ist der Ablauf von Visual Odometry:
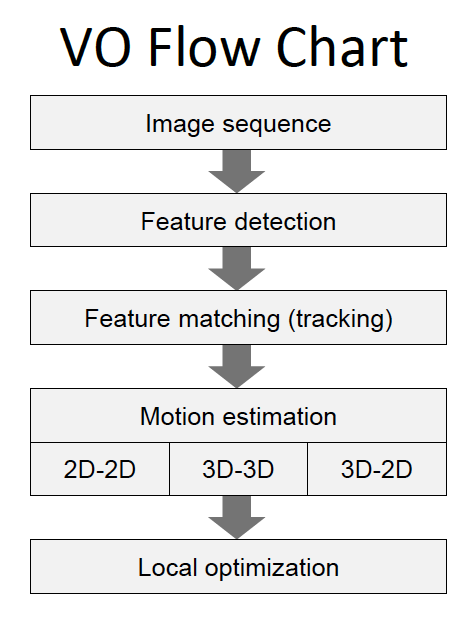
VO Flow Chart
Der Robo-Tag war absolut spannend und inspirierend. Und das meinen nicht nur wir, sondern auch die HWZ Disruptors Philipp Bühler, Christoph Biveroni und Stefan Lienhard:
Wichtige Links und weltweite Informationen:
Coole Robo-Beispiel:
Unser Newsletter liefert dir brandaktuelle News, Insights aus unseren Studiengängen, inspirierende Tech- & Business-Events und spannende Job- und Projektausschreibungen, die die digitale Welt bewegen.